Toyota Camry: BSM function - BSM (Blind Spot Monitor)
The BSM function uses radar sensors to detect the following vehicles traveling in an adjacent lane in the area that is usually not reflected in the outside rear view mirror (the blind spot), and advises the driver of the presence of such vehicles via the indicators on the outside rear view mirrors.
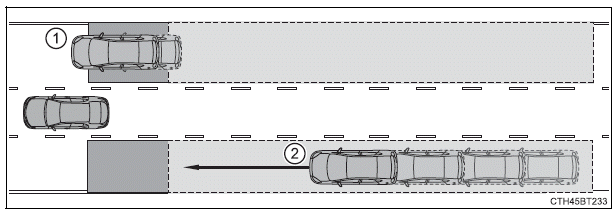
- Vehicles that are traveling in areas that are not visible using the outside rear view mirrors (the blind spots)
- Vehicles that are approaching rapidly from behind in areas that are not visible using the outside rear view mirrors (the blind spots)
BSM function detection areas
The areas that vehicles can be detected in are outlined below.
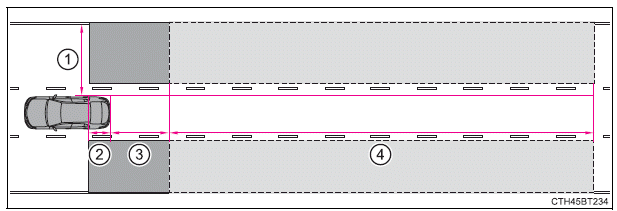
The range of the detection area extends to:
- Approximately 1.6 ft. (0.5 m) to 11.5 ft. (3.5 m) from either side of
the vehicle
The area between the side of the vehicle and 1.6 ft. (0.5 m) from the side of the vehicle cannot be detected - Approximately 3.3 ft. (1 m) forward of the rear bumper
- Approximately 9.8 ft. (3 m) from the rear bumper
- Approximately 9.8 ft. (3 m) to 197 ft. (60 m) from the rear bumper
The greater the difference in speed between your vehicle and the detected vehicle is, the farther away the vehicle will be detected, causing the outside rear view mirror indicator to illuminate or flash
WARNING
■Cautions regarding the use of the system
The driver is solely responsible for safe driving. Always drive safely, taking care to observe your surroundings.
The BSM function is a supplementary function which alerts the driver that a vehicle is present in the blind spot. Do not overly rely on the BSM function.
The function cannot judge if it is safe to change lanes, therefore over reliance could cause an accident resulting in death or serious injury.
According to conditions, the system may not function correctly. Therefore the driver's own visual confirmation of safety is necessary.
■The BSM function is operational when
- The BSM function is turned on
- Vehicle speed is greater than approximately 10 mph (16 km/h).
■The BSM function will detect a vehicle when
- A vehicle in an adjacent lane overtakes your vehicle.
- Your vehicle overtakes a vehicle in an adjacent lane slowly.
- Another vehicle enters the detection area when it changes lanes.
■Conditions under which the system will not detect a vehicle
The BSM function is not designed to detect the following types of vehicles and/or objects:
- Small motorcycles, bicycles, pedestrians, etc.*
- Vehicles traveling in the opposite direction
- Guardrails, walls, signs, parked vehicles and similar stationary objects*
- Following vehicles that are in the same lane*
- Vehicles driving 2 lanes across from your vehicle*
- Vehicles which are being overtaken rapidly by your vehicle
*: Depending on the conditions, detection of a vehicle and/or object may occur.
■Conditions under which the system may not function correctly
- The BSM function may not detect vehicles correctly in the following
conditions:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When driving on a road surface that is wet with standing water during bad weather, such as heavy rain, snow, or fog
- When mud, snow, ice, a sticker, etc. is covering the sensor or surrounding area on the rear bumper
- When there is a significant difference in speed between your vehicle and the vehicle that enters the detection area
- When a vehicle is in the detection area from a stop and remains in the detection area as your vehicle accelerates
- When driving up or down consecutive steep inclines, such as hills, a dip on the road, etc.
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When multiple vehicles are approaching with only a small gap between each vehicle
- When vehicle lanes are wide, or when driving on the edge of a lane, and the vehicle in an adjacent lane is far away from your vehicle
- When the vehicle that enters the detection area is traveling at about the same speed as your vehicle
- When there is a significant difference in height between your vehicle and the vehicle that enters the detection area
- Directly after the BSM function is turned on
- Instances of the BSM function unnecessarily detecting a vehicle and/or
object may increase under the following conditions:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When the distance between your vehicle and a guardrail, wall, etc. that enters the detection area is short
- When there is only a short distance between your vehicle and a following vehicle
- When vehicle lanes are narrow, or when driving on the edge of a lane, and a vehicle traveling in a lane other than the adjacent lanes enters the detection area
- When items such as a bicycle carrier are installed on the rear of the vehicle
- When driving up and down consecutive steep inclines, such as hills, dips on the road, etc.
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
READ NEXT:
 Intuitive parking assist
Intuitive parking assist
The distance from your vehicle to nearby objects when parallel
parking or maneuvering into a garage is measured by the sensors
and communicated via the multi-information display and a
buzzer. Alway
Display - Intuitive parking assist
When the sensors detect an object, the following displays inform the
driver of the position and distance to the object.
Front corner sensor operation
Front center sensor operation
Rear corner
Changing the buzzer sounds volume - Intuitive parking assist
The buzzer volume can be changed on the multi-information display when the
engine switch is in IGNITION ON mode.
■The system can be operated when
The engine switch is in IGNITION ON mode.
I
SEE MORE:
System Description
SYSTEM DESCRIPTION USB AUDIO SYSTEM FUNCTION OUTLINE
(a) The No. 1 stereo jack adapter assembly is equipped with a USB connector. Connecting a USB device or "iPod" to the No. 1 stereo jack adapter assembly allows music files to be played. Not only is it possible to play music from a USB device wit
Vehicle load limits
Vehicle load limits include total load capacity, seating capacity,
towing capacity and cargo capacity.
◆ Total load capacity (vehicle capacity weight)
Total load capacity means the combined weight of occupants, cargo
and luggage.
◆ Seating capacity
Seating capacity means the maximum number
